Wheel Made of ‘Odd Matter’ Spontaneously Rolls Uphill
Samuel Velasco/Quanta Magazine
Introduction
In a physics lab in Amsterdam, there’s a wheel that can spontaneously roll uphill by wiggling.
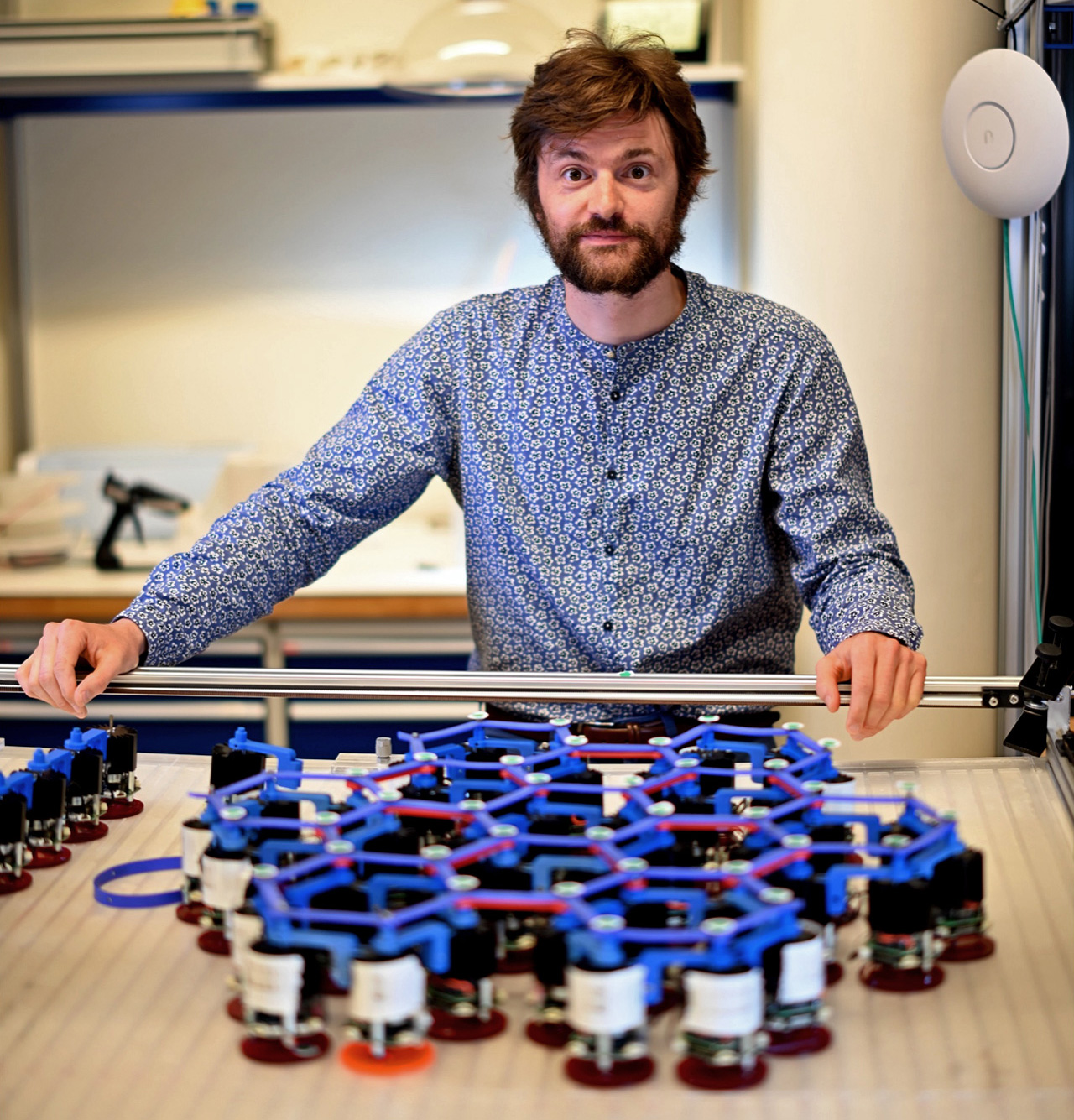
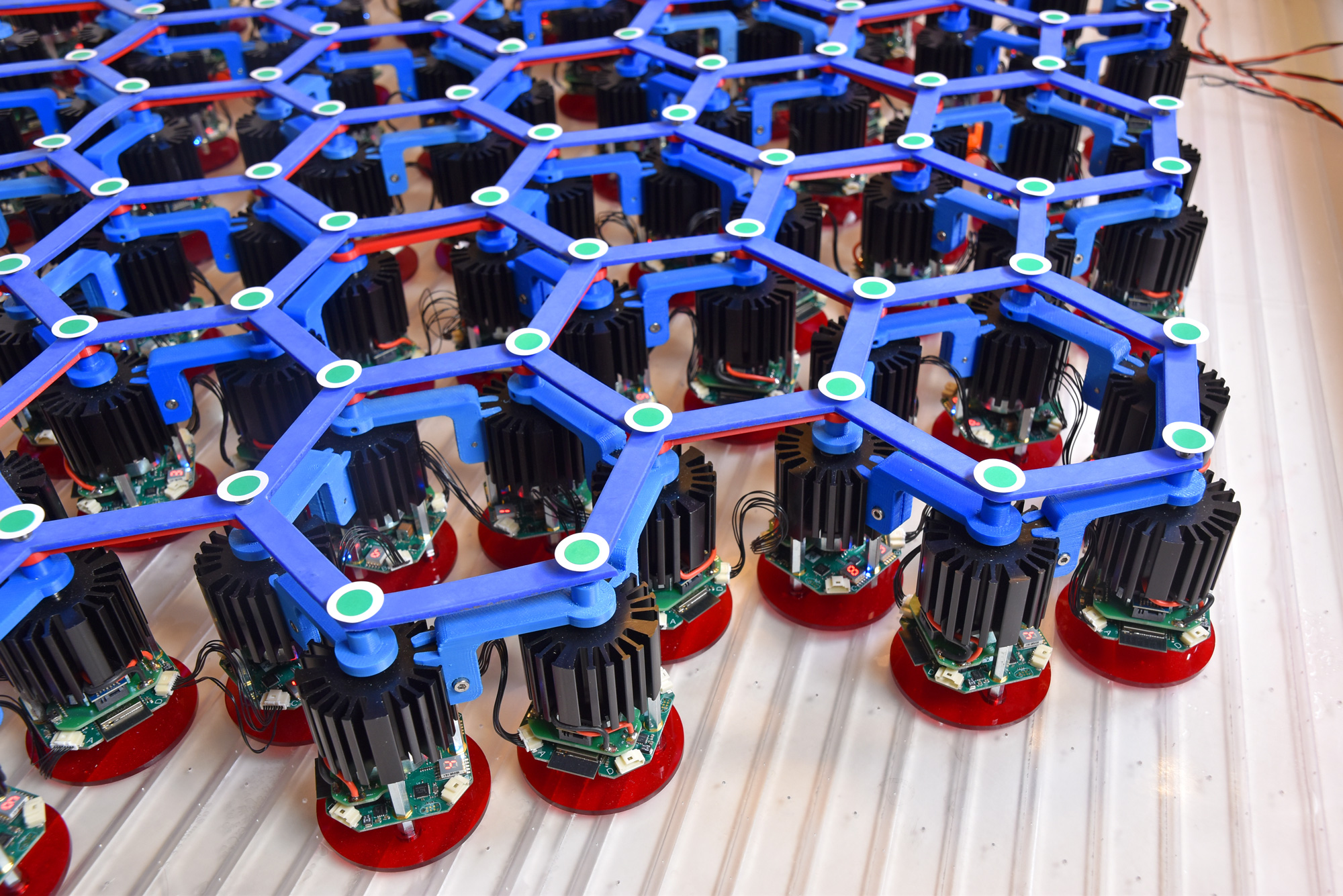
This “odd wheel” looks simple: just six small motors linked together by plastic arms and rubber bands to form a ring about 6 inches in diameter. When the motors are powered on, it starts writhing, executing complicated squashing and stretching motions and occasionally flinging itself into the air, all the while slowly making its way up a bumpy foam ramp.
“I find it very playful,” said Ricard Alert, a biophysicist at the Max Planck Institute for the Physics of Complex Systems in Dresden, Germany, who was not involved in making the wheel. “I liked it a lot.”
The odd wheel’s unorthodox mode of travel exemplifies a recent trend: Physicists are finding ways to get useful collective behavior to spontaneously emerge in robots assembled from simple parts that obey simple rules. “I’ve been calling it robophysics,” said Daniel Goldman, a physicist at the Georgia Institute of Technology.
The problem of locomotion — one of the most elementary behaviors of living things — has long preoccupied biologists and engineers alike. When animals encounter obstacles and rugged terrain, we instinctively take these challenges in stride, but how we do this is not so simple. Engineers have struggled to build robots that won’t collapse or lurch forward when navigating real-world environments, and they can’t possibly program a robot to anticipate all the challenges it might encounter.
The odd wheel, developed by the physicists Corentin Coulais of the University of Amsterdam and Vincenzo Vitelli of the University of Chicago and collaborators and described in a recent preprint, embodies a very different approach to locomotion. The wheel’s uphill movement emerges from simple oscillatory motion in each of its component parts. Although these parts know nothing about the environment, the wheel as a whole automatically adjusts its wiggling motion to compensate for uneven terrain.
The physicists also created an “odd ball” that always bounces to one side and an “odd wall” that controls where it absorbs energy from an impact. The objects all stem from the same equation describing an asymmetric relationship between stretching and squashing motions that the researchers identified two years ago.
“These are indeed behaviors you would not expect,” said Auke Ijspeert, a bioroboticist at the Swiss Federal Institute of Technology Lausanne. Coulais and Vitelli declined to comment while their latest paper is under peer review.
In addition to guiding the design of more robust robots, the new research may prompt insights into the physics of living systems and inspire the development of novel materials.
Odd Matter
The odd wheel grew out of Coulais and Vitelli’s past work on the physics of “active matter” — an umbrella term for systems whose constituent parts consume energy from the environment, such as swarms of bacteria, flocks of birds and certain artificial materials. The energy supply engenders rich behavior, but it also leads to instabilities that make active matter difficult to control.
Physicists have historically focused on systems that conserve energy, which must obey principles of reciprocity: If there’s a way for such a system to gain energy by moving from A to B, any process that takes the system from B back to A must cost an equal amount of energy. But with a constant influx of energy from within, this constraint no longer applies.
In a 2020 paper in Nature Physics, Vitelli and several collaborators began to investigate active solids with nonreciprocal mechanical properties. They developed a theoretical framework in which nonreciprocity manifested in the relationships between different kinds of stretching and squashing motions. “That to me was just a beautiful mathematical framework,” said Nikta Fakhri, a biophysicist at the Massachusetts Institute of Technology.
Suppose you squash one side of a solid, causing it to bulge outward in a perpendicular direction. You can also stretch and squash it along an axis rotated by 45 degrees, distorting it into a diamond shape. In an ordinary, passive solid, these two modes are independent; deforming the solid in one direction does not deform it along either diagonal.
In an active solid, the researchers showed that the two modes can instead have a nonreciprocal coupling: Squashing the solid in one direction will also squash it along the axis rotated by 45 degrees, but squashing along this diagonal will stretch it, not squash it, along the original axis. Mathematically, the number describing the coupling between these two modes is positive going one way and negative going the other way. Because of the sign difference, the physicists call the phenomenon “odd elasticity.”
In an odd elastic solid, undoing a deformation isn’t as simple as reversing the stretching and squashing motions that produced it; instead, the cycle of deformations that returns the solid to its starting configuration can leave it with some excess energy. This has striking consequences, such as enabling uphill locomotion of the odd wheel.
Corentin Coulais of the University of Amsterdam.
David Dykstra
Meanwhile Coulais, an experimentalist, was studying nonreciprocity in robotic active matter consisting of a chain of simple modules, each outfitted with a motor, sensor and microcontroller. With these sensing and control capabilities, Coulais could use feedback loops to program each module to respond nonreciprocally to the movements of its neighbors.
The two physicists, former colleagues at Leiden University in the Netherlands, then teamed up to develop robotic active matter that would embody the mathematics of odd elasticity.
Uncommon Oscillations
Ordinary elasticity — the springiness of matter — is a bulk property that emerges from springlike interactions between matter’s microscopic constituents. Coulais and Vitelli sought to put an odd twist on the elastic interactions between robotic modules.
In their new design, each module consisted of a motor controlling the rotation of two plastic arms, with rubber bands supplying springiness by pulling back on the arms. The researchers started with a pair of modules sharing an arm. Sensors and controllers on the modules implemented a nonreciprocal feedback loop: A clockwise turn of the first one’s motor would generate a clockwise torque on the second one’s motor, but a clockwise rotation of the second motor would induce a counterclockwise torque on the first.
This arrangement is inherently unstable. Left undisturbed, the modules will sit still forever, but even the slightest nudge will give rise to an unending tug of war: Whichever way a motor turns, its interaction with the other motor pushes it back in the opposite direction. If the coupling between the modules is strong enough, the arms will start oscillating back and forth with increasing amplitude.
On a 2D plot with axes representing the two motor angles, these growing oscillations will appear as an outward spiral, gaining energy on each cycle like a runner descending an M.C. Escher staircase and picking up speed with each lap. But the motors can only put out so much torque, and energy is lost to friction, so the amplitude of the oscillations eventually tops out. On the 2D plot of motor angles, the spiraling trajectory converges to a circle, then keeps retracing its path exactly. Physicists call this self-sustained, constant-amplitude oscillation a limit cycle.
The modules’ limit-cycle oscillations represent a victory of stable, regular motion over the chaos that so often plagues complex systems. Consider the chaotic “double pendulum,” which consists of one pendulum hanging from another: Small changes in its initial conditions soon lead to totally different trajectories through space. Limit cycles are the opposite phenomenon: Different initial conditions ultimately yield the same trajectory. In the case of Coulais and Vitelli’s odd modules, regardless of which arm was initially nudged and in which direction, the system eventually exhibits the same steady-state oscillations.
This key feature makes limit-cycle oscillations more special than, say, the familiar cyclical motion of a (single) pendulum. On a 2D plot of a pendulum’s position and velocity, its oscillations appear as orbits around a closed loop, but if you start the pendulum swinging at different speeds, it’ll trace a larger or smaller circle. Limit-cycle oscillations are much more robust: Many trajectories that start out different converge on exactly the same orbit, and if the system is nudged away from this orbit, it’ll get pulled back in.
These limit-cycle oscillations offered the researchers a way to tame the unruly dynamics of active matter and put it to work.
Behind the Wheel
Now that Coulais and Vitelli had engineered the building blocks of odd matter, it was time to assemble them. Many modules connected in the right way would resemble the odd elastic solid Vitelli had initially envisioned. What would happen if these modules were linked together with shared arms to form a wheel?
When the team supplied power to the motors, the loop began to oscillate, interweaving stretching and squashing with similar motions angled at 45 degrees. It switched back and forth between the two modes of self-deformation in Vitelli’s theory of odd elasticity. The limit-cycle oscillations of adjacent motors generated a limit cycle in the collective motion of the wheel as a whole. The oddness of the motors’ coupling singled out a direction for the wheel’s locomotion, much as an Escher staircase breaks the symmetry between clockwise and counterclockwise laps — it’s all downhill one way and all uphill the other way. The energy generated during each limit cycle allowed the wheel to push off against the ground and roll upward.
Odd interactions between adjacent robotic modules can also be utilized to construct an odd wall.
Courtesy of Corentin Coulais
It’s hard to pin down why the wheel’s uphill locomotion is so robust, precisely because its limit cycle is an emergent phenomenon, not seen when you scrutinize any individual module. Nick Gravish, a roboticist at the University of California, San Diego, suspects that the limit-cycle oscillations of each pair of motors greatly restrict the possible collective motions of the wheel. He noted that the emergence of collective motion from low-level oscillations has parallels in biology: “Animals are lots of interconnected oscillatory components that have to work together.”
Coulais and Vitelli also explored the effects of odd couplings on collisions. They showed that an odd ball — a projectile assembled from odd modules — would always bounce off in a specific direction when launched without any spin, while an odd wall could control the direction in which it absorbed energy from a projectile. These functions could prove useful in the design of new active materials, said Denis Bartolo, a physicist at the École Normale Supérieure in Lyon, France, adding that “the next huge step to be made would be to find a way to self-assemble these machines.”
Robophysics
Before the recent experiments, it wasn’t obvious that odd interactions would give rise to locomotion. Each motor responds only to its neighbors, and yet the wheel moves forward. This absence of top-down control is especially intriguing to biologists seeking to understand how swarms cooperate without designated leaders, and how primitive animals without nervous systems seek out food.
The emergent locomotion of the odd wheel is appealing to researchers largely because the wheel’s building blocks are so simple. “You can just be lost in the complexity of living systems,” said Alert. He pointed to a famous quote from Richard Feynman: “What I cannot create, I do not understand.”
Coulais and Vitelli developed their odd modules without mimicking any specific living system, so it’s an open question whether biology has made use of the same emergent dynamics. M. Cristina Marchetti, a theoretical physicist at the University of California, Santa Barbara, called the result “very interesting,” and said the next step to understanding its possible role in biology is to see how well the behavior persists in a noisy environment like that of a living cell.
But whereas evolution often finds good solutions to problems, it can miss opportunities. The odd wheel might be a true novelty. Bartolo notes that, in the design of robots, machines and materials, bioinspiration has its limits: “If you tried to make a plane using beating wings, you would still be walking or swimming from Normandy to New York.”